Introduction
This article is intended to aid a user of the MachineMetrics platform that wants to extend the monitored RTDE values beyond the defaults by modifying the recipe for RTDE Output on a Universal Robot. This article expects that the user has already undergone the process for adding a new machine to your account. All configuration in this article is conducted through Data Collection described in the machine settings documentation.
The Universal Robot RTDE interface has many variables available for output, by default only a few necessary variables monitored by MachineMetrics. The default RTDE values are limited to just the necessary entries to facilitate observing and monitoring base health and execution of the robot. The user can choose to register additional RTDE Output variables to monitor any valid RTDE value by explicitly by adding them to the RTDE Output recipe configuration.
Note: If you have questions about this functionality, please reach out directly to your customer success manager or contact support@machinemetrics.com.
Topics covered in this article
Robot RTDE Output Configuration
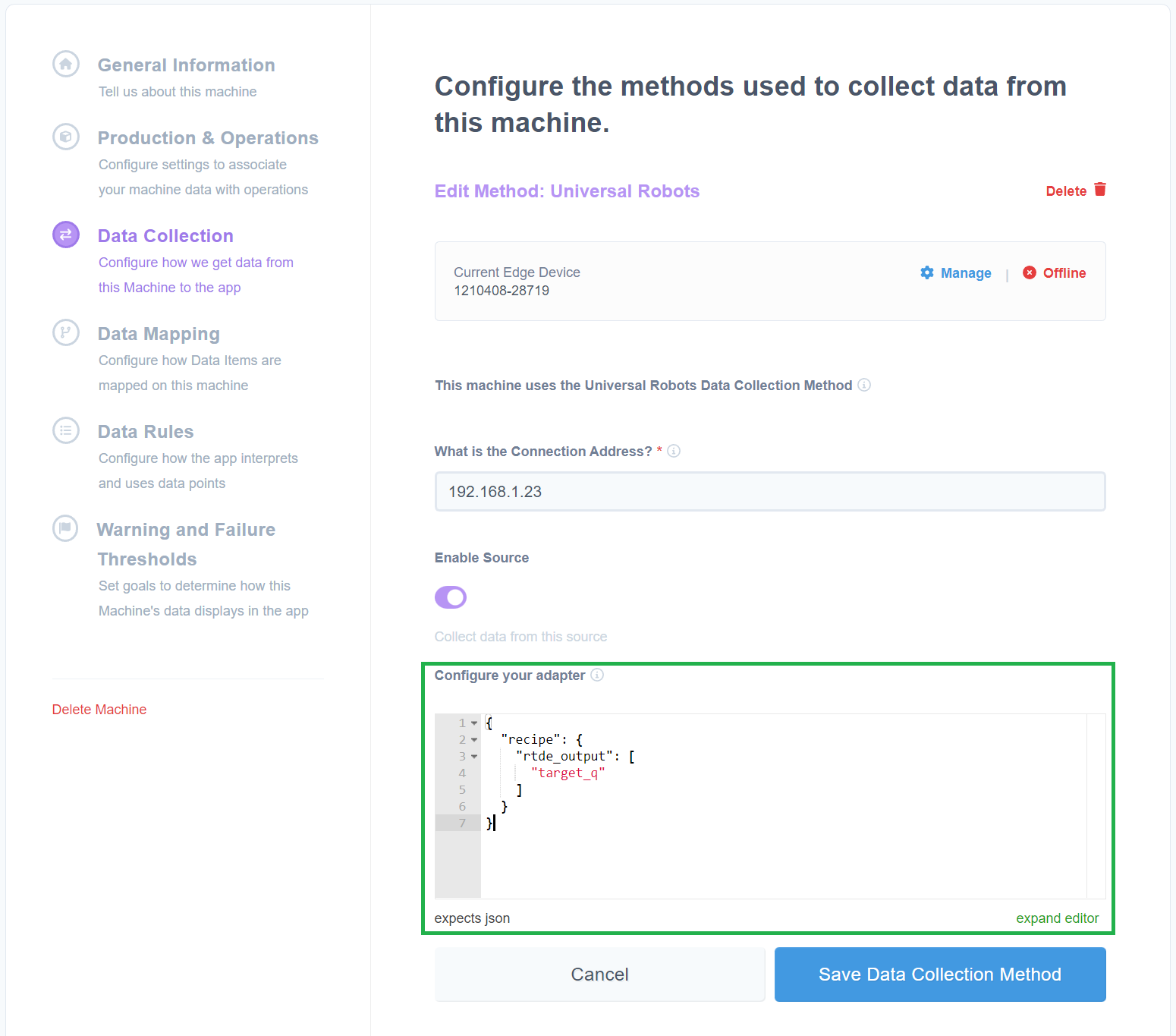
Variables reported from the RTDE interface on the Universal Robot can be configured in the Data Collection of the Universal Robots machine. These fields can be specified using the recipe section, and declaring the RTDE Output field, specified as a string array consisting of each RTDE Output variable to be monitored.
By default the following RTDE Output variables are pre-registered
-
timestamp (registered but is fully suppressed and not reported)
-
robot_mode
-
safety_status_bits (used to indicate various possible emergency stop conditions)
Note: The full list of valid RTDE Output values that can be monitored from the robot controller can be found on the Universal Robots documentation at Real-Time Data Exchange (RTDE) Guide - 22229
Below we see an example of extending RTDE Outputs where a user defines target_q for observation.
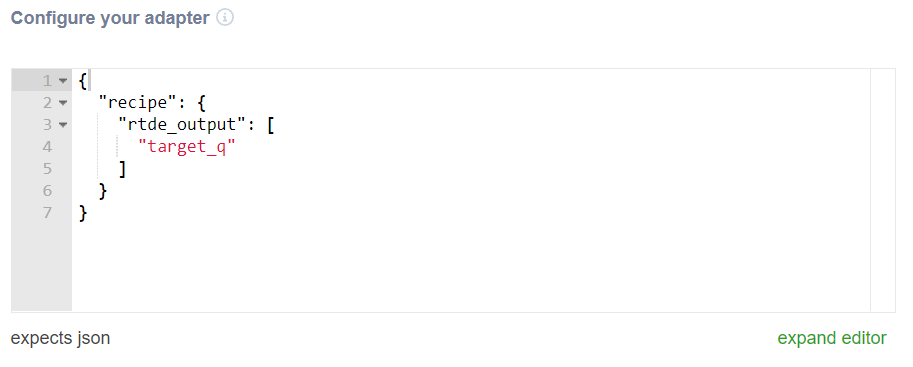
RTDE Output values like target_q are defined in the UR Documentation to be reported for every joint in a Vector6D, so the values for target_q that arrives at the platform will be decomposed such that each joint has it’s own identifier as follows:
-
target_q_base
-
target_q_shoulder
-
target_q_elbow
-
target_q_wrist_1
-
target_q_wrist_2
-
target_q_wrist_3
Note: The above pattern of expanding the RTDE Output variable to cover each data origin in a suffix is followed for other data types as well. Another example is TCP variables reporting as Vector6D with a suffix of _x, _y, _z, _rx, _ry, and _rz.
Robot RTDE Output Data Mapping
After configuring to monitor an RTDE Output, they need data mapping to be conducted in App. For more detail on mapping data see Mapping Data (Machine Settings) .
Note: If you have questions about this functionality, please reach out directly to your customer success manager or contact support@machinemetrics.com.
Comments
0 comments
Please sign in to leave a comment.